

예전에는 별 생각없이 넘어갔다가 이번에 이슈가 되니 갑자기 급 관심이 가서 흥미가 생긴 부분입니다.
어쨰서 EOTS는 센서 앞에 미러가 붙은것일까?
보통 FLIR들은 아래 사진과 같은 구조로 만들어져 있습니다.
센서 모듈을 일정각도의 보정이 가능한 기계적인 짐벌위에 올려 3축 보정을 통해 진동을 잡습니다.
그리고 센서모듈 안에 레이저 표적지시기와 영상카메라, 적외선모듈을 같이 얹게 되죠
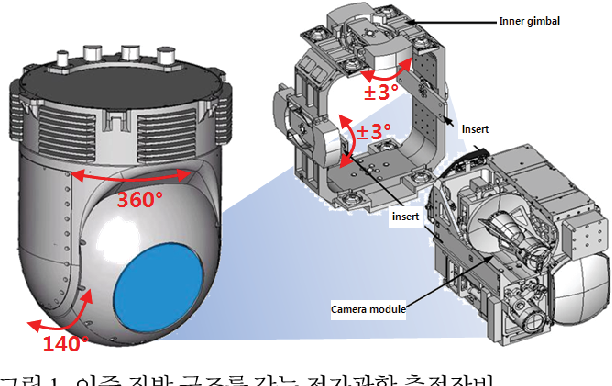
이런 형태는 외부로 꽤 많은 돌출을 시켜야 시야가 확보되는 특성이 있습니다.
그래서 공군은 외부 포드식으로 탑재시키고 헬기들은 전방이나 측,하방에 터렛을 달죠.
해군의 해상초계기는 사용시에만 외부로 돌출시킵니다.
그런데 EODAS는 기체 외부에 여러대의 카메라로 외부 감시가 가능한 특성이 있으니 굳이 터렛을 돌리면서 시야를 확보할 필요가 있을까 하시겠지만......EOTS는 한가지 더 해야만 합니다.
바로 표적지시죠.
추적하며 찍어줘야하니 저런 터렛처럼 가동이 가능해야 합니다.

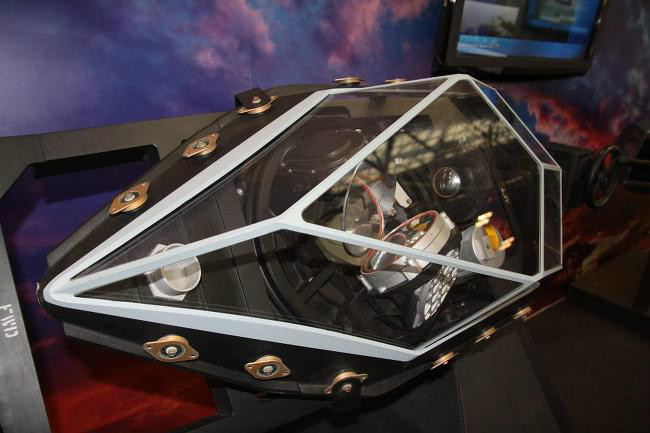
일단 사진상으로 모듈 전체적인 AZ축 회전은 확인 됩니다.

이 반사경을 이용해 정면까지도 볼수 있는것으로 보이구요.
미러는 EL축의 역활을 하는걸로 보입니다.
일단 저는 개발자가 아니고 업무상 FLIR을 뜯어본적이 있는 정도라 제 예상은 어디까지나 흥미로만 보시기 바랍니다.
기존의 방식은 센서모듈 전체를 움직여야 하다보니 구동부가 꽤 컸습니다.
짐벌덩치도 그에 맞는 사이즈가 되어야 했는데 미러만 움직이면 꽤 장점이 많아 보이긴 합니다.
(과연 이 미러에 짐벌같은 기능이?)
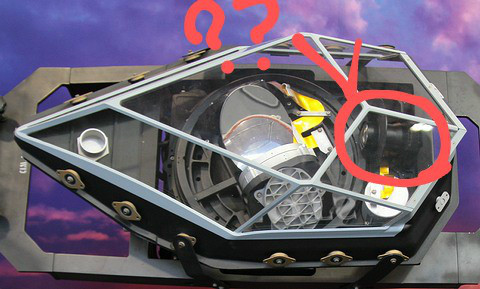
그런데 정면을 바라보는 고정된 또 하나의 렌즈는 대체 뭔지.....
TV카메라인지 레이저인지 왜 센서와 함께 안움직이고 따로 노는지 미스테리 입니다.
모드전환하면 빠르게 저 카메라에 맞춰 미러가 움직여 주는지, 아니면 다른 기능이 있는건지...
그리고 외부 프레임이 시야를 가릴텐데 그부분에 따른 보정을 넣을거 같은데 독특하게 작동할거 같습니다.
저 반사경과 함께 움직이는 센서 내부에 모든 기능이 통합되어 들어간거 같지는 않은데
아니면 저 센서로 보이는 부분도 잠망경같은 반사경이고 실제 센서모듈은 수직으로 내려보는 구조로 통합되어 있을지도 모르겠다는 생각이 듭니다.
구동부를 가볍게 만들면 관련 서보모터들이 작아질수 있고 경량화가 되고 진동보정같은경우도 더 쉽게 할수 있긴하죠.


















































이걸 센서부를 상부에 고정시키고 잠망경처럼 보면서 미러를 조정해 구동 및 안정화에 필요한 서보 구동부를 최소화해서 경량화시키고 외부노출을 최소화하지않았나 하는 생각입니다.
현재 비 스텔스기들도 irst를 통한 대응방법을 마련하고 있죠.
0/2000자